UKRI Future Leaders Fellowship (Round 5)
![]()
![]()
RoboHike: Autonomous Quadrupedal Robot Navigation and Hiking in Challenging Rough Terrains
Project Overview
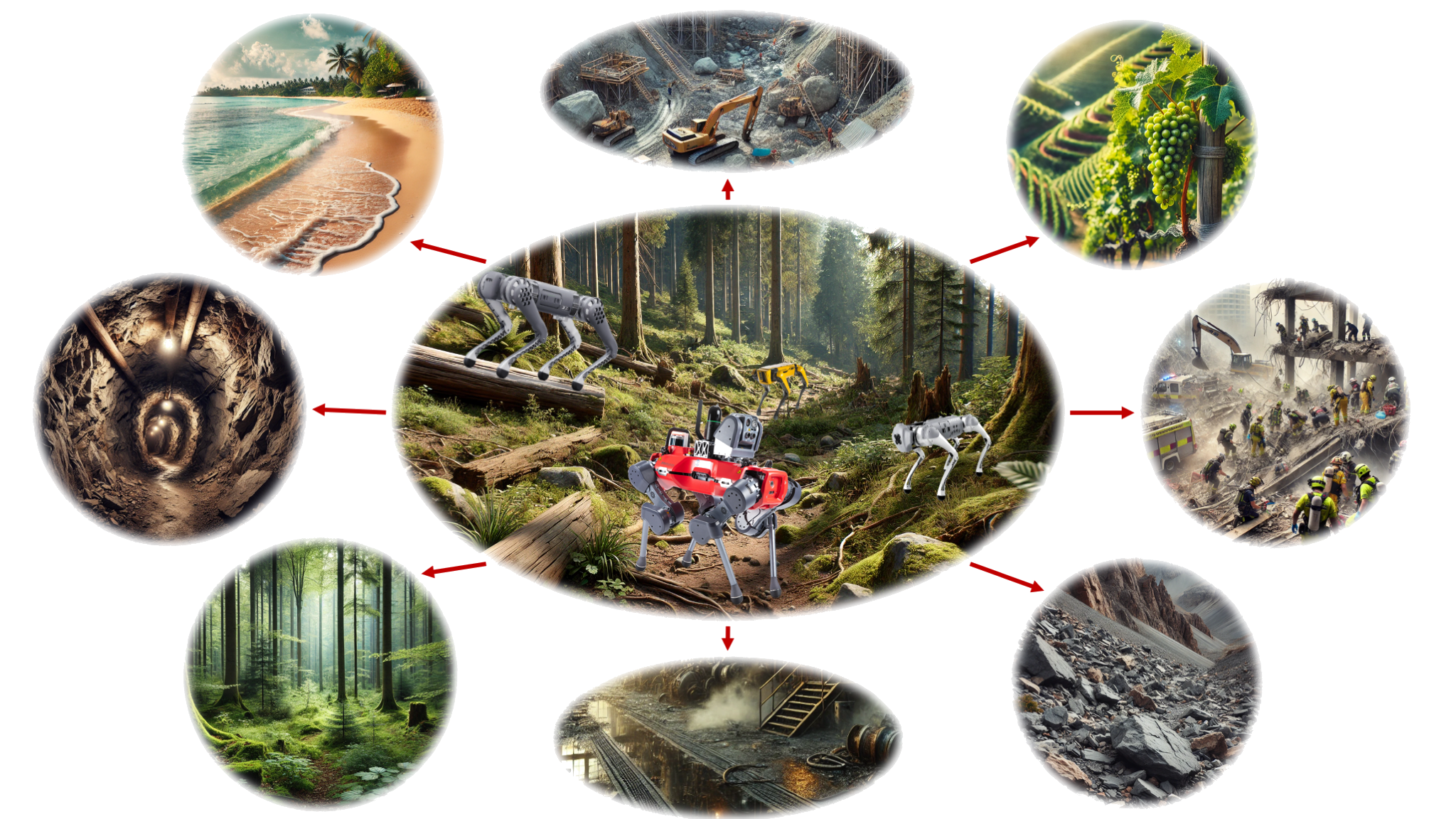
RoboHike is a cutting-edge research fellowship focused on developing novel high-level perception and learning frameworks to enable autonomous quadrupedal robots to effectively model, identify, and map footholds in challenging terrains. The goal is to achieve fast, robust, and reliable navigation, empowering quadrupeds with advanced hiking skills in complex environments.
By leveraging next-generation cognition and learning techniques, RoboHike aims to enhance the autonomy of quadrupeds in critical industries such as agrculture, forestry, hard-to-reach environments, construction, and disaster response. These environments often require efficient, precise, and safe navigation where manual labor is not feasible due to extreme or hazardous conditions.
Vision
RoboHike envisions autonomous robotic systems capable of performing demanding tasks in environments traditionally requiring human intervention. The fellowship’s long-term objective is to endow quadrupedal robots with advanced environmental cognition, allowing them to autonomously handle dangerous, strenuous, or inaccessible work. Through innovations in navigation, the project contributes to the broader goal of automating labor-intensive tasks in industries where safety and efficiency are paramount.
Key Application Areas:
- Agriculture
- Forestry
- Construction
- Mines
- Search-and-Rescue