Project
Title: TeLeMan - Teleoperative Legged Manipulator for Explosive Ordnance Disposal
Project Description:

Human life is invaluable and needs to be protected by all means. Defence and security communities face high risks at a regular basis, either this is a result of investigation, monitoring, or patrolling.
On the other side, several robotic platforms have shown great capabilities and robustness into operating in challenging environments, such as hazardous ones. Thus, telepresence in robotics has the potential in providing safety solutions to such scenarios. Autonomy though is challenging, and thus teleoperation could be a compromise between robotic autonomy and human presence.
In this project, we aim at developing teleoparative methods, for humans controlling a ground robot from distance to help with Explosive Ordnance Disposal (EOD). We use a legged quadruped robot, embedded with a manipulator and several sensory systems, as well as tele-operative and tele-existence devices from the human operator side. In particular, our goal is to understand the capabilities of such a system for defence and security with the potential to be applied in real-world applications.
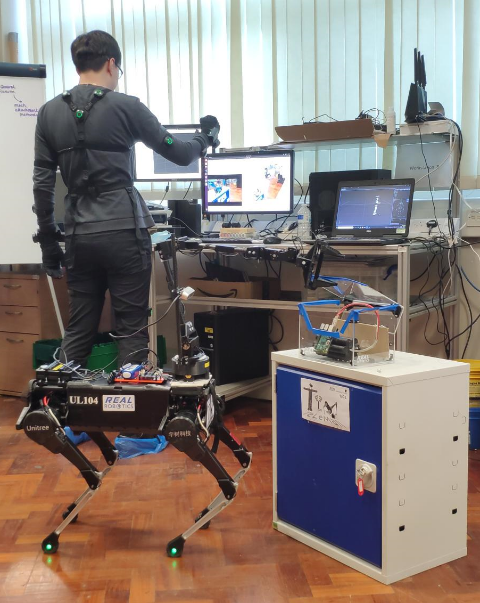
A video shows how the TeLeMan robot works for an EOD task:
TeLeMan – Teleoperation and Telexistence of a Legged Manipulator via IMU-Body Sensing for EOD