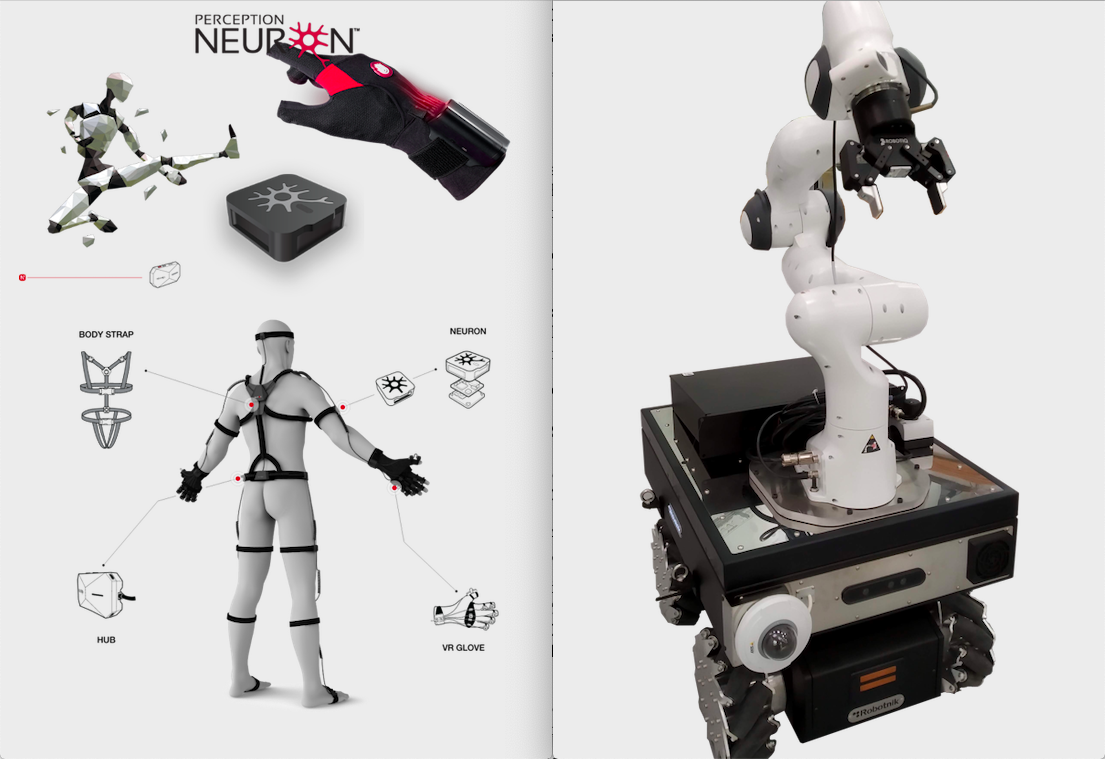
TeleGrasp:
Semi-Autonomous Object Grasping using Robot Vision and Human IMU-based Teleoperation
This project is funded by the UCL-Osaka University Strategic Partnership: one year fund for Robot Teleoperation.
PI: Dimitrios Kanoulas (UCL), Co-I: Weiwei Wan (Osaka University)
Funding: £10,000.00 [UCL: £5,000.00 ; Osaka: £5,000.00]
Duration: [11/2020-10/2021]\
This project is also funded by the UCL-CS Strategic Research scheme: support for the UCL-Osaka partnership.
PI: Dimitrios Kanoulas (UCL)
Funding: £2,059.60
Duration: [11/2020-10/2021]