Results
1. Conference Paper Publication: Humanoids 2020
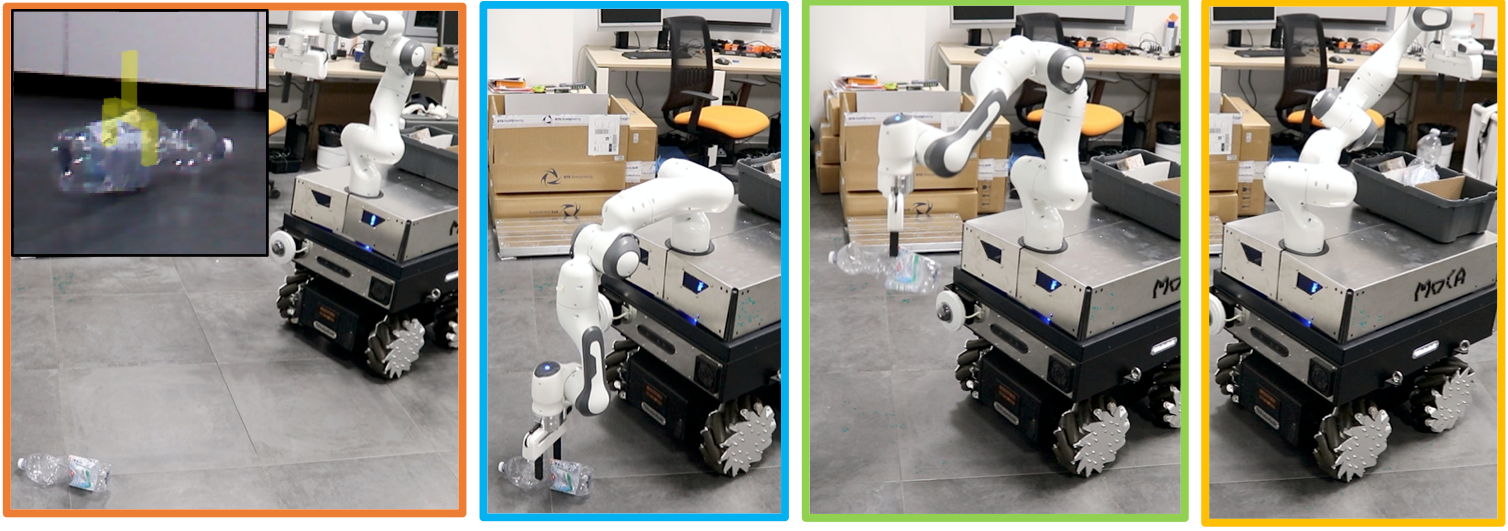
Title: “Garbage Collection and Sorting with a Mobile Manipulator using Deep Learning and Whole-Body Control”
PDF: https://bit.ly/33RCyMX
Authors: Jingyi Liu, Pietro Balatti, Kirsty Ellis, Denis Hadjivelichkov, Danail Stoyanov, Arash Ajoudani, and Dimitrios Kanoulas
Venue: 2020 IEEE-RAS International Conference on Humanoid Robots (Humanoids), https://humanoids-2020.org
Description: Domestic garbage management is an important aspect of a sustainable environment. This paper presents a novel garbage classification and localization system for grasping and placement in the correct recycling bin, integrated on a mobile manipulator. In particular, we first introduce and train a deep neural network (namely, GarbageNet) to detect different recyclable types of garbage. Secondly, we use a grasp localization method to identify a suitable grasp pose to pick the garbage from the ground. Finally, we perform grasping and sorting of the objects by the mobile robot through a whole-body control framework. We experimentally validate the method, both on visual RGB-D data and indoors on a real full- size mobile manipulator for collection and recycling of garbage items placed on the ground.
Poster: link
2. IEEE Spectrum: Robot Friday News (14/05/2021)

Link: https://spectrum.ieee.org/video-friday-virtual-cat-petting